ロボットオフラインプログラミング 入門講座
産業用ロボットを導入して、オフラインティーチングを実施される人のための基本知識を説明します。
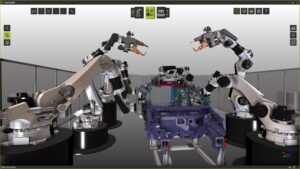
産業用ロボットを含む生産設備の適用検討を主目的とした汎用ロボットシミュレーションソフトと、実機ロボットのオフライン教示を主目的としたオフラインティーチングソフト(OLT)が存在しています。 この2つのソフトウェアは、それぞれ個々の特長・利点があり、別々で使われることが多々ありました。 各ロボットメーカーが、自社のロボット専用に開発したOLTを実機ロボットの購入時に、一緒に導入されたユーザー様も多いと聞いております。
しかしながら、汎用シミュレーションソフトを使って適用検討用に作成した仮想設備モデルや動作ツールパス情報が、下流のOLT業務に再利用されず、機構定義や動作ツールパスの再作成という手戻りが発生しているケースも多々あります。 そのため、適用検討用のロボットシミュレーションから、最適化検証機能を付加して、実機との誤差の少ないオフラインプログラムまで出力できるロボットオフラインプログラミングソフトウェアが最近普及してきております。 ロボットの動作検証と加工工程検証を同時に可能にするものです。