スポット溶接向けロボットオフラインプログラミング
ロボット1台によるスポット溶接工程から何十台のロボットが同時に稼働する車体スポット溶接工程までサポートします。
製品データの読込みから設備レイアウト検討、打点データによるロボット動作軌跡の作成及び3Dシミュレーション、そしてオフラインプログラムまでを簡単な操作で一気に実現します。
製品データの読込みから設備レイアウト検討、打点データによるロボット動作パスの作成及び3Dシミュレーション、そしてオフラインプログラムまでを簡単な操作で一気に実現します。
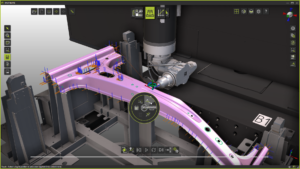
1.製品データ上の点データから瞬時に面直計算してロボットのツールパスを自動で作成します。
2.スポット溶接用の加工レシピを使用して、作成されたツールパスは最適化されます。(最短距離で編集)
3.加工レシピには、サーボガン自動開閉機能も準備されており、高精度のサイクルタイム検証が可能
4.溶接ガンのアプローチ(進入方向)とリトラクト(退避方向)の動作パスはテンプレートに沿って自動作成可能
5.工程順序バランシング機能を使用して、複数ロボットの作業平準化が容易に可能
6.スポット溶接ガンの干渉チェック機能は各打点に対してパイチャート表示が可能です。
7.外部システムからの打点データ(CSV, XML)の取込も可能 関連リンク -
1.スポット溶接プロセスの最適化機能
溶接打点を最短距離で溶接する動作パスを作成。 ルールに従って自動的にパスを作成する機能。
2.サーボガンの自動開閉機能により、高精度のサイクルタイム検証が可能
3.アプローチとリトラクトの自動作成機能
溶接ガンのアプローチ(進入方向)とリトラクト(退避方向)の動作パスを事前定義に沿って自動作成する機能。
4.外部システムからの打点データのデータ取込機能
外部システムからの打点データ取込みや3D上の点データから動作ツールパスを自動作成。
溶接打点データを使った組立プロセスの自動化を実現するお手頃価格のロボットオフラインプログラミングソリューションです。
主な機能:
1. パネル、溶接打点、溶接条件、治具&クランプなどの設備を考慮したロボット溶接工程シミュレーションが出来ます。
2. 複数台ロボットと外部軸との協調動作定義が可能です。
3. 高速干渉チェック機能に加えて、各種キャリブレーションにも対応しています。
4. 複数リソースに対するI/O設定におけるサイクルタイム検証が可能です。
5. サーボ溶接ガンの自動開閉機能機能により高精度のサイクルタイム検証の貢献
6. ガン進入方向自動補間機能
スポット溶接向け:熱変形解析ソフトJWeldとFASTSUITE Edition2との連携ソリューション
基本情報
•代表的な3DCADデータのダイレクト入力機能
•CAD中間フォーマット入力は標準装備
•世界中のロボットメーカーをサポート
•直感的でタブレット感覚の操作性(オブジェクト指向)
•サーボガン自動開閉機能とガンチェンジ機能のサポート
•複数台ロボットや外部軸などに対するI/O同期設定可能。
•協調動作定義(マスター&スレーブ機能)が可能
•CAD上の点データから面直計算してツールパスを自動作成
•アプローチ/リトラクトのパラメーター設定(テンプレート化)でパス作成を自動化
•治具やクランプなどを考慮したコントローラー仕様や溶接条件を簡単にパラメーター入力可能
•到達性検討、干渉チェック、エラーモニタリング等の解析機能
•キャリブレーション機能を搭載
•スポット溶接パラメーターの事前定義
•速度、加減速、同期コマンド、I/Oシグナルなどの定義
•動作シミュレーションの3DPDF動画出力
•実機ロボットコントローラーの仕様に準拠したダウンローダーを搭載
•実機ロボットプログラムをアップロードしてシミュレーション再現が可能