直感的な操作でサイクルタイムの最適化 工程順序バランシング
複数ロボットによる作業工程を平準化してサイクルタイムを短縮する。
複数のロボットが係る製造工程において、各ロボットの作業時間を均等化し、生産性を向上させるための機能です。 具体的には、各ロボットが担当する作業の割り当て、及び作業順序を調整して、ボトルネックとなる作業を解消することです。ライン全体のサイクルタイムを短縮して効率的な生産を可能にすることが出来ます。
基本情報
1)各オペレーション毎にサイクルタイムを自動計算して視認性に優れたガントチャートで表示
2)個々のオペレーションを他のロボットに割振ったり並び替えが可能
3)直観的なマウスを使ったドラッグ&ドロップ操作で簡単操作
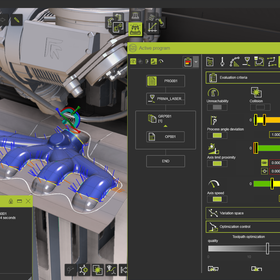
4)サイクルタイム計算は、ツールパスの長さとプログラムされている移動速度を考慮して算出される
用途/実績例
すべてのロボット加工テクノロジーに適用
1.スポット溶接
2.アーク溶接
3.ドリリング&リベッティング
4.ハンドリング&組立
5.塗装&シーリング
<iframe width="560" height="315" src="https://www.youtube.com/embed/X8m7Z6tYqn0" title="サイクルタイムを最適化する工程順序バランシングをロボットシミュレーションで実現" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture; web-share" referrerpolicy="strict-origin-when-cross-origin" allowfullscreen></iframe>